Д.П.Лукьянов, д-р техн. наук, проф., В.В.Лучинин, д-р техн. наук, проф. В.Ю.Скворцов, канд. техн. наук, Санкт-Петербургский государственный электротехнический университет “ЛЭТИ”
МИКРОАКСЕЛЕРОМЕТР
НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ
![]()
|
Рассмотрены принципы построения и основные технические характеристики микроакселерометра на поверхностных акустических волнах с частотной формой выходного сигнала. Приведены кинематическая схема акселерометра дифференциального типа, различные варианты топологии кристалла, возможные способы изготовления |
![]()
Принцип действия и основы
проектирования микроакселерометра
Введение
Акселерометры на поверхностных акустических волнах (ПАВ) представляют собой перспективный класс микроакселерометров фазового и особенно частотного типа, позволяющих реализовать высокий уровень конструктивной интеграции, обеспечить высокую устойчивость к внешним возмущениям, возможность существенного сокращения числа деталей и соединений между ними. Они обеспечивают возможность перекрытия без компенсации широкого рабочего диапазона (до 105 g) при частотной форме выходного сигнала.
Датчики механических величин на ПАВ обычно имеют чувствительные элементы с дифференциальным включением ПАВ-преобразователей. Для получения дифференциальной схемы традиционно используется размещение ПАВ-преобразователей на двух параллельных плоскостях подложки, чтобы преобразователи изменяли свои параметры в равной степени, но с противоположными знаками [1]. Эта конструкция приводит к серьезному усложнению процесса изготовления. В данной статье рассматривается датчик с ПАВ-преобразователями, расположенными на одной рабочей плоскости подложки, что обеспечивает простую в технологическом отношении конструкцию. В этом случае один из ПАВ-преобразователей размещается в зоне, свободной от деформаций.
Принцип действия и основы проектирования микроакселерометра
Твердотельные электронные устройства на ПАВ обычно представляют собой подложку из пьезоэлектрического материала, на одной или нескольких плоских поверхностях которой формируется периодическая встречно-штыревая структура проводящих электродов, предназначенная как для электрического возбуждения ПАВ, так и для их приема (обратного преобразования в электрический сигнал). При деформациях изгиба происходит изменение фазовой скорости ПАВ и шага периодической структуры.
Принцип действия акселерометров на ПАВ заключается в том, что выходной частотный сигнал вырабатывается в результате деформации подложки, на поверхности которой сформирован один или несколько ПАВ-преобразователей. Деформация происходит под действием усилия, создаваемого при ускорении инерционной массы. Обобщенная схема микроакселерометра, где ось чувствительности совпадает с нормалью к плоскости, в которой лежат ПАВ-преобразователи, показана на рис. 1. Консольная схема с изгибом пластины упругого подвеса имеет достаточно высокую чувствительность, но при этом снижаются жесткость и резонансная частота конструкции. Основным достоинством этой схемы является возможность реализации подвижной системы в интегральном виде. Роль упругого подвеса выполняет подложка с ПАВ-преобразователями. Придавая соответствующую конфигурацию подложке, можно формировать требуемую амплитудно-частотную характеристику (АЧХ) акселерометра. Консольная схема подвеса дает достаточно высокую линейность и позволяет реализовать простые и высокочувствительные преобразователи на широкий диапазон номинальных нагрузок [1].
|
|
|
Рис. 1. Микроакселерометр с частотным выходом |
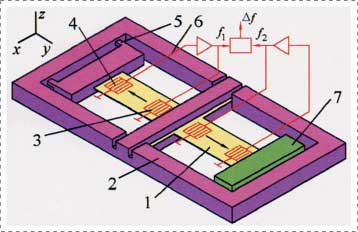
Микроакселерометр (рис. 1) представляет собой монолитную квазисимметричную конструкцию из двух консольных балок 1 с инерционными грузами 7 на конце каждой. На поверхности консольных балок 1 располагаются линии задержки (ЛЗ) на основе встречно-штыревых преобразователей (ВШП).
Схема ЛЗ изображена на рис. 2. Балки 1 исполняют роль звукопроводов.
Одна консоль является опорной (эталонной), и для того, чтобы избежать ее
деформации под действием ускорения, она прикреплена с помощью перемычек 5
к рамочному корпусу 2. Система имеет два входных (3)
и два выходных (4) ВШП для реализации схемы с частотным выходным сигналом ![]() . На схеме показаны также токопроводы 6 для подвода и снятия сигналов. Ось чувствительности
направлена перпендикулярно консольным балкам 1, плоскости корпуса 2 и совпадает с направлением оси
. На схеме показаны также токопроводы 6 для подвода и снятия сигналов. Ось чувствительности
направлена перпендикулярно консольным балкам 1, плоскости корпуса 2 и совпадает с направлением оси
![]() .
.
В основу построения чувствительных элементов на ПАВ положена зависимость их скорости от деформации подложки, которая в свою очередь зависит от ускорения. Изменение фазовой скорости ПАВ может оцениваться либо по фазовой задержке (пассивная схема) [1-3], либо по сдвигу частоты генератора с линией задержки в цепи обратной связи (активная схема). Предпочтительными являются автоколебательные схемы с частотным выходом, практически это схема усилителя с положительной обратной связью. В конечном счете, чувствительность микроакселерометра определяется задержкой ПАВ в замедляющей структуре.
Процесс преобразования физической величины в частоту выходного сигнала датчика на поверхностных акустических волнах можно представить в виде последовательности преобразований: измеряемая механическая величина преобразуется в деформацию упругого подвеса чувствительного элемента (пьезоэлектрическая подложка с ПАВ-устройством), что, в свою очередь, вызывает изменение фазочастотной характеристики этого устройства и приводит к изменению частоты колебаний автогенератора, содержащего в цепи образной связи ЛЗ.
В наиболее распространенных линиях с прямолинейной траекторией распространения ПАВ задержка сигнала определяется расстоянием между преобразователями и скоростью распространения ПАВ. Существующий набор материалов для пьезоэлектрических звукопроводов с учетом ограничений на их конечные линейные размеры и скорости распространения ПАВ позволяет оценить достижимые пределы задержки сигнала. Температурные коэффициенты задержки для данных материалов определяют температурную стабильность электрических параметров ЛЗ. В подавляющем большинстве случаев в ЛЗ с фиксированной задержкой сигнала используют неаподизованные входной и выходной преобразователи, полностью идентичные между собой; сквозная АЧХ определяется произведением АЧХ входного и выходного преобразователей.
Расчет линии задержки
Порядок расчета ЛЗ определяется требованиями, предъявляемыми к ее основным электрическим параметрам. Например, если заданная задержка сигнала обеспечивается при использовании различных пьезоматериалов, выбор между ними проводится либо на основе энергетического критерия (обеспечения минимальных потерь на фиксированной частоте генерации ПАВ), либо на основе критерия температурной стабильности параметров (в частности, температурной стабильности задержки).
Предположим, что материал звукопровода выбран из условия обеспечения
максимальной температурной стабильности задержки сигнала. Одним из таких
материалов является пьезокварц ![]() -среза
-среза ![]() или срез
или срез ![]() ). В этом случае поток энергии направлен по волновому
вектору. Кроме того, среди подложек из кварца наименьшей температурной
зависимостью фазовой скорости распространения ПАВ
). В этом случае поток энергии направлен по волновому
вектору. Кроме того, среди подложек из кварца наименьшей температурной
зависимостью фазовой скорости распространения ПАВ ![]() обладают подложки
обладают подложки ![]() -среза с ориентацией
-среза с ориентацией ![]() . Характерные свойства этого материала приведены ниже.
. Характерные свойства этого материала приведены ниже.
Тип среза........................................................................................... ![]()
Ориентация подложки
и направление распространения......................................... ![]()
Фазовая скорость распространения ![]() , м/с..................................... 3158
, м/с..................................... 3158
Относительное изменение фазовой скорости ![]() ................. 5,5 10-4
................. 5,5 10-4
Угол Ф между направлением потока энергии
и волновым вектором............................................................................ 0
Затухание ПАВ для ориентации кварцевой подложки
при 1 ГГц, дБ×см-1............................................................................... 6,7
Относительная разность ![]() скоростей ПАВ на электрически закороченной
(металлизированной) поверхности
скоростей ПАВ на электрически закороченной
(металлизированной) поверхности ![]() и свободной
поверхности
и свободной
поверхности ![]() для волны в заданном направлении
служит для определения коэффициента электромеханической связи:
для волны в заданном направлении
служит для определения коэффициента электромеханической связи:
![]() .
.
Дальнейшая последовательность расчетных операций определяется требуемыми
электрическими параметрами ЛЗ. Если основным является обеспечение минимальных
потерь на фиксированной частоте генерации ПАВ, то оптимальное число пар
электродов ![]() опт во
входном и выходном преобразователях для заданного пьезоматериала определяется
как
опт во
входном и выходном преобразователях для заданного пьезоматериала определяется
как ![]() опт =
опт =![]() [1]. Для кварца
[1]. Для кварца ![]() -среза
-среза ![]() опт
опт![]() 26.
26.
При этом каждый из преобразователей может быть оптимально согласован в
полосе ![]() п=
п=![]() опт
опт![]() где
где ![]() – центральная, или
средняя, частота. При
– центральная, или
средняя, частота. При ![]() =800 МГц и
=800 МГц и ![]() п=40 МГц
результирующая полоса пропускания ЛЗ с учетом перемножения АЧХ входного и
выходного преобразователей составит
п=40 МГц
результирующая полоса пропускания ЛЗ с учетом перемножения АЧХ входного и
выходного преобразователей составит ![]() 0,035 (
0,035 (![]() п
п![]() 28 МГц).
Вносимые потери при этом минимальны.
28 МГц).
Вносимые потери при этом минимальны.
Вместе с тем далеко не всегда требования к ЛЗ ограничены обеспечением заданной задержки сигнала и ее температурной стабильности. Расчет значительно усложняется в том случае, когда ширина полосы пропускания ЛЗ задана одновременно с требованием минимизации потерь.
Число электродов преобразователей (при идентичности конструкции входного и выходного преобразователей) выбирается в этом случае исходя из соотношения:
![]() ,
,
или, полагая, как и выше, ![]() МГЦ,
получим
МГЦ,
получим ![]() , где
, где ![]() – коэффициент,
учитывающий сужение полосы пропускания ЛЗ, соответствующей произведению АЧХ
входного и выходного преобразователей.
– коэффициент,
учитывающий сужение полосы пропускания ЛЗ, соответствующей произведению АЧХ
входного и выходного преобразователей.
Для обеспечения энергетического (электроакустического) согласования тракта в
рабочей полосе частот в качестве звукопровода должен использоваться материал,
оптимальное число пар электродов ![]() опт которого
наиболее близко к
опт которого
наиболее близко к ![]() .
.
Если число электродов ![]() , выбранное в
соответствии с приведенным выше условием, больше оптимального для данного
материала звукопровода, полоса пропускания электрической согласующей цепи шире
полосы пропускания собственно преобразователя (
, выбранное в
соответствии с приведенным выше условием, больше оптимального для данного
материала звукопровода, полоса пропускания электрической согласующей цепи шире
полосы пропускания собственно преобразователя (![]() э
э![]() a), и наоборот. Для обеспечения энергетического согласования
тракта в полосе пропускания отношение сопротивления нагрузки
a), и наоборот. Для обеспечения энергетического согласования
тракта в полосе пропускания отношение сопротивления нагрузки ![]() (или генератора
(или генератора ![]() г) к
сопротивлению излучения выходного или входного преобразователей
г) к
сопротивлению излучения выходного или входного преобразователей ![]() должно выбираться из
условия:
должно выбираться из
условия:
![]() /
/![]() =
=![]() э
э![]()
![]() ,
,
где ![]() – число электродов
преобразователя;
– число электродов
преобразователя; ![]() э – добротность электрической цепи;
э – добротность электрической цепи; ![]() – добротность акустической
цепи.
– добротность акустической
цепи.
|
|
|
Рис. 2. Структурная
схема линии задержки, |
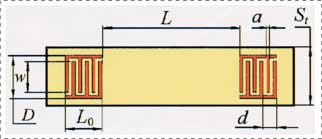
Период электродов преобразователя ![]() (расстояние между
двумя ближайшими штырями одной полярности) выбирается из соотношения
(расстояние между
двумя ближайшими штырями одной полярности) выбирается из соотношения ![]() =3158/800=3,94 мкм (рис. 2). Ширина электродов
=3158/800=3,94 мкм (рис. 2). Ширина электродов ![]() обычно равна четверти
их периода (
обычно равна четверти
их периода (![]() ), т.е.
), т.е. ![]() =3,9475/4=0,98 мкм. При этом протяженность одного
преобразователя
=3,9475/4=0,98 мкм. При этом протяженность одного
преобразователя ![]() =(
=(![]() )
)![]() =159 мкм.
=159 мкм.
Минимальное значение апертуры преобразователя с учетом ограничения дифракционных искажений определяется из условия:
![]() ,
,
где ![]() – длина волны ПАВ на частоте генерации;
– длина волны ПАВ на частоте генерации;
![]() – время задержки.
– время задержки.
Максимальное значение апертуры ![]() обычно ограничивается
конечной шириной звукопровода
обычно ограничивается
конечной шириной звукопровода ![]() . При этом
пределы изменения
. При этом
пределы изменения ![]() весьма малы, поэтому
требуемая степень рассогласования обеспечивается чаще всего за счет внешних
цепей.
весьма малы, поэтому
требуемая степень рассогласования обеспечивается чаще всего за счет внешних
цепей.
Предположим, что необходимо создать задержку сигнала ![]() мкс, тогда длина акустического пути
мкс, тогда длина акустического пути ![]() =3158 мм.
Вместе с тем
=3158 мм.
Вместе с тем ![]() должна удовлетворять условию (для
генератора с ЛЗ на ПАВ)
должна удовлетворять условию (для
генератора с ЛЗ на ПАВ) ![]() . Тогда при
. Тогда при ![]() и
и ![]() мкм длина акустического пути
мкм длина акустического пути ![]() =103 мкм.
При
=103 мкм.
При ![]() мкм,
мкм, ![]() мкм и
мкм и ![]() мкм.
Длина
мкм.
Длина ![]() ограничена размерами
ПАВ-структуры и затуханием энергии ПАВ и не должна превышать
ограничена размерами
ПАВ-структуры и затуханием энергии ПАВ и не должна превышать ![]() мкм.
мкм.
Изменение времени задержки ПАВ-структуры под воздействием инерционной силы
вызывает относительное изменение частоты генератора ![]() . В преобразователях механических величин значение
. В преобразователях механических величин значение ![]() обычно доходит до 1%.
обычно доходит до 1%.
Оценка основных характеристик
|
|
|
Рис. 3. Расчетная схема |
Рассмотрим прогиб ![]() подвижного элемента
микроакселерометра (рис. 3). После составления приближенного дифференциального
уравнения изогнутой оси консольной балки и его интегрирования окончательно
запишем:
подвижного элемента
микроакселерометра (рис. 3). После составления приближенного дифференциального
уравнения изогнутой оси консольной балки и его интегрирования окончательно
запишем:
 , (1)
, (1)
где ![]() – сосредоточенная сила;
– сосредоточенная сила; ![]() – модуль упругости;
– модуль упругости; ![]() – момент инерции сечения относительно
оси
– момент инерции сечения относительно
оси ![]() .
.
Определение прогиба по теореме Максвелла-Мора дает иную формулу:
 . (2)
. (2)
Максимальным считается прогиб в точке ![]() при
при ![]() . Все
геометрические размеры и другие параметры подвижного элемента приведены ниже.
. Все
геометрические размеры и другие параметры подвижного элемента приведены ниже.
Упругий подвес (длина ´ ширина ´ толщина), мм,
![]() ................................................................................. 1,9´1,4´0,02
................................................................................. 1,9´1,4´0,02
Инерционный груз (длина ´ ширина ´ толщина), мм,
![]() ............................................................................... 0,57´3,4´0,3
............................................................................... 0,57´3,4´0,3
Координаты центра масс ![]() ;
; ![]() , мм ............................................. 2,08;
0
, мм ............................................. 2,08;
0
Осевой момент инерции для
сечения
на участке ![]() , м4 ..................................................................... 9,33×10-19
, м4 ..................................................................... 9,33×10-19
Объем подвижного элемента ![]() пэ,
м3.................................................. 0,63
пэ,
м3.................................................. 0,63
Плотность, кварц (кремний), ![]() , кг/м3.................................... 2649
(2328)
, кг/м3.................................... 2649
(2328)
Модуль упругости (![]() ),
), ![]() ,
, ![]() /м2...................................... 1,46×1011
/м2...................................... 1,46×1011
Масса подвижного элемента,
кварц (кремний), ![]() , кг ................................................ 1,67×10-6 (1,47×10-6)
, кг ................................................ 1,67×10-6 (1,47×10-6)
В датчиках на основе ПАВ применяются пьезоэлектрические монокристаллы, однако в
последнее время в связи с развитием технологии микроэлектроники наиболее часто
стали использовать слоистые материалы, позволяющие возбуждать ПАВ электрическим
полем и в непьезоэлектрической среде. Особенно распространена комбинация пленки
оксида цинка ![]() ) и монокристаллического кремния. Однако наиболее
перспективной представляется комбинация пленки
) и монокристаллического кремния. Однако наиболее
перспективной представляется комбинация пленки ![]() и кремния [4]. В этом
случае для дополнительной температурной компенсации можно использовать свойства
самих материалов, в частности, коэффициентов теплового расширения. В [4]
показано, что при определенном соотношении толщин слоев
и кремния [4]. В этом
случае для дополнительной температурной компенсации можно использовать свойства
самих материалов, в частности, коэффициентов теплового расширения. В [4]
показано, что при определенном соотношении толщин слоев ![]() и
и ![]() достигается
значительное уменьшение зависимости частоты акустической волны от изменения
температуры в диапазоне 0...80°С.
достигается
значительное уменьшение зависимости частоты акустической волны от изменения
температуры в диапазоне 0...80°С.
В случае учета только веса подвижного элемента ![]() наибольший статический
прогиб по (1) для балки из кремния, ориентированной в плоскости (100), будет
наибольший статический
прогиб по (1) для балки из кремния, ориентированной в плоскости (100), будет ![]() м, для кварца –
м, для кварца – ![]() м.
м.
Найдем собственную частоту колебаний подвижного элемента микроакселерометра:
![]() кГц
(кварц),
(3)
кГц
(кварц),
(3)
где ![]() – коэффициент
пропорциональности, учитывающий упругость балки подвеса. Для кремния оказалось
– коэффициент
пропорциональности, учитывающий упругость балки подвеса. Для кремния оказалось ![]() кГц. В [5] на основе принципа Рэлея было получено
другое выражение для расчета собственной частоты:
кГц. В [5] на основе принципа Рэлея было получено
другое выражение для расчета собственной частоты:
 , (4)
, (4)
где ![]() ;
; ![]() – инерционная масса.
Расстояние
– инерционная масса.
Расстояние ![]() между концом консоли и
центром инерциальной массы будет
между концом консоли и
центром инерциальной массы будет ![]() . Последнее уравнение дает лучшие результаты при большем
соотношении
. Последнее уравнение дает лучшие результаты при большем
соотношении ![]() , где
, где ![]() – масса консольной балки упругого
подвеса. Более точное выражение можно получить из уравнения Эйлера с
соответствующим числом граничных условий:
– масса консольной балки упругого
подвеса. Более точное выражение можно получить из уравнения Эйлера с
соответствующим числом граничных условий:
 ,
(5)
,
(5)
где  ;
; ![]() – плотность материала
консольной балки;
– плотность материала
консольной балки; ![]() – площадь поперечного сечения консольной
балки.
– площадь поперечного сечения консольной
балки.
Граничные условия для (5) имеют вид:
при ![]() ,
, ![]() ;
;
при ![]() ,
, ![]() .
.
Однако эта методика дает длинное неявное уравнение, корни которого могут
быть найдены только численными методами. Изгибающий момент ![]() и сила
и сила ![]() , действующая
на подвес, могут быть приближенно рассмотрены в виде разложения в ряд Тэйлора:
, действующая
на подвес, могут быть приближенно рассмотрены в виде разложения в ряд Тэйлора:
![]() ,
,
![]() .
.
Параметр ![]() можно не учитывать,
когда момент инерции поперечного сечения инерционной массы намного больше, чем
у консольной балки.
можно не учитывать,
когда момент инерции поперечного сечения инерционной массы намного больше, чем
у консольной балки.
Корни уравнения Эйлера были определены численно с помощью метода Ньютона. В
результате можно получить ряд собственных частот. Для подвижного элемента из
кремния с ориентацией в плоскости (100) первая собственная частота была ![]() кГц, вторая собственная частота –
кГц, вторая собственная частота – ![]() кГц.
кГц.
Сравнение результатов расчета собственной частоты с помощью уравнений
(1)-(4) показано на рис. 4, где частота является функцией инерционной
массы ![]() .
.
|
|
|
Рис. 4. Зависимость собственной частоты от изменения инерционной массы |
Изменение частоты генератора ![]() в зависимости от деформации
подложки обычно выражается уравнением [7]:
в зависимости от деформации
подложки обычно выражается уравнением [7]:
![]() ,
,
где ![]() .
.
Схема генератора показана на рис. 5, где 1, 4 – согласующие
четырехполюсники; 2 – широкополосный усилитель; 3 – частотно-избирательная схема. При этом реализуются следующие
параметры: ![]() МГц, диапазон перестройки
МГц, диапазон перестройки ![]() МГц.
МГц.
|
|
|
Рис. 5. Схема генератора с линией задержки на ПАВ |
В результате получается микроакселерометр на ПАВ с характеристиками, которые приведены ниже:
Чувствительность, кварц, Гц / g (Гц / м / с2)....................... 440 (44,9)
Диапазон измерения ускорения, g (м / с2)......................... ±15 (±147)
Нелинейность выходной
характеристики, %................................... 1
Рабочий диапазон температур, °С........................................... 10 – 30
Габаритные размеры, мм.................................................. 6,6´4,6´0,5
Масса микроакселерометра,
кварц (кремний), кг................................................ 1,44×10-5 (1,26×10-5)
|
|
|
Рис. 6. Внешний вид чувствительного элемента |

Внешний вид предлагаемой конструкции микроакселерометра (без
ПАВ-преобразователей и токоразводки) показан на рис. 6. Практическая
реализация работы находится на стадии изготовления фотошаблонов. Базовые
технологические операции нанесения ![]() на
на ![]() и травление кремния отработаны. В дальнейшем
планируется создание полностью интегрального микроакселерометра, включая
измерительные цепи формирования и обработки сигналов.
и травление кремния отработаны. В дальнейшем
планируется создание полностью интегрального микроакселерометра, включая
измерительные цепи формирования и обработки сигналов.
![]()
Рассмотрен один из перспективных принципов построения микроакселерометров на пространственных замедляющих структурах.
Предлагаемые для использования ПАВ на частотах порядка 800…1000 МГц характеризуются весьма малыми длинами волн (микронный диапазон), что делает реальной постановку задачи обобщения принципов построения широкого класса микрочувствительных элементов от ультразвуковых на ПАВ до микрооптоэлектромеханических, использующих, например, брэгговские дифракционные структуры пассивного и активного типов.
Список литературы
1. Малов В.В. Пьезорезонансные датчики, 2-е изд., перераб. и доп., М.: Энергоатомиздат, 1989.
2. Лукьянов Д.П., Скворцов В.Ю. Микроакселерометры на периодических структурах // Навигация и управление движением. Материалы II научно-технической конференции молодых ученых, ГНЦ РФ “Электроприбор”, 28-31 марта, С-Петербург, 2000. С. 82-87.
3. Лукьянов Д.П., Скворцов В.Ю., Торопов Ю.А. Микроаксерелометр на поверхностных акустических волнах // 1-я международная конференция по мехатронике и робототехнике, посвященная 100-летию со дня рождения Д.А.Завалишина (МИР '2000), 29 мая – 2 июня, С-Петербург. Т. 2. Сб. трудов СПб.: НПО Омега, 2000. С. 177-183.
4. AIN/silicon Lamb-wave microsensors for pressure and gravimetric measurement / A.Choujaa et al. // Sensors and Actuators. A. Physical. 1995. Vol. 46-47. P. 179-183.
5. Roylance L.М., Angell J.B. A batch-fabricated silicon accelerometer // IEFE Trans. Electron Devices, ED-26 (1979). P. 1911-1917.
6. Зеленка И. Пьезоэлектрические резонаторы на объемных и поверхностных акустических волнах: Материалы, технология, конструкция применение: Пер. с чешек. М.: Мир, 1990.
7. Toda К. Characteristics of interdigital transducers for mechanical sensing and non-destructive testing // Sensors and Actuators. A. Physical. 1994. Vol. 44. № 3. P. 241-247.
| Наверх |