С.Ш. Рехвиашвили, канд. физ. – мат. наук, Научно-исследовательский институт прикладной математики и автоматизации КБНЦ РАН (г. Нальчик)
ТЕОРЕТИЧЕСКИЙ АНАЛИЗ МОДУЛЯЦИОННОГО И ФРИКЦИОННОГО РЕЖИМОВ
АТОМНО-СИЛОВОГО МИКРОСКОПА
![]()
|
Анализируются некоторые важные вопросы теории атомно-силовой микроскопии. Приводятся расчеты сил взаимодействия для игл различной формы. Рассматриваются теоретические модели модуляционной и фрикционной силовой микроскопии в приближении эффективной массы осциллятора. Рассчитывается траектория движения зонда с учетом эффекта прилипания – скольжения |
![]()
Введение
Одним из самых современных приборов, в котором широко используются различные микросистемы, является атомно-силовой микроскоп (АСМ) [1]. АСМ – прибор, позволяющий с помощью маленькой иглы получать изображения и исследовать различные свойства поверхностей твердых тел с атомарным уровнем разрешения. В настоящее время АСМ стал незаменимым инструментом для исследований во многих областях науки и техники. Прежде всего, это физика и химия поверхности, биология и медицина, машиностроение и микроэлектроника.
АСМ зондирует поверхность образца с помощью острой иглы, которая располагается на свободном конце консоли кантилевера (рис. 1).
|
|
|
Рис. 1. Схема контакта в АСМ |
Силы, возникающие между иглой и поверхностью образца, вызывают
деформацию консоли, которая в процессе сканирования детектируется оптической
системой. Сигнал с оптической системы используется для построения изображения
исследуемой поверхности. В зависимости от расстояния сканирования ![]() различают три основных
режима (моды) функционирования АСМ: контактный режим (
различают три основных
режима (моды) функционирования АСМ: контактный режим (![]() нм); бесконтактный режим (
нм); бесконтактный режим (![]() нм); полуконтактный режим (вертикальное расстояние
сканирования может меняться в широких пределах). Для всех режимов возможны два
способа регистрации сигнала: непосредственные измерения отклонения консоли
кантилевера (режим топографии и режим боковых сил) и модуляционные измерения
(регистрация амплитуды, частоты или фазы колебаний консоли кантилевера, а также
двухпроходной режим).
нм); полуконтактный режим (вертикальное расстояние
сканирования может меняться в широких пределах). Для всех режимов возможны два
способа регистрации сигнала: непосредственные измерения отклонения консоли
кантилевера (режим топографии и режим боковых сил) и модуляционные измерения
(регистрация амплитуды, частоты или фазы колебаний консоли кантилевера, а также
двухпроходной режим).
Представляет интерес расчет траекторий движения зондовых сенсоров АСМ. Этот интерес вызван в основном двумя причинами. Во-первых, расчеты обеспечивают более корректную интерпретацию экспериментальных данных, получаемых с помощью АСМ. Во-вторых, расчеты позволяют глубже понять особенности взаимодействия зонд – поверхность в современных микросистемах записи и считывания информации. В настоящей статье проводятся расчеты нормальной и латеральной траекторий движения консоли кантилевера АСМ в приближении эффективной массы осциллятора. Рассчитаны силы взаимодействия (притяжения и отталкивания) для зондов различной формы.
Расчет сил взаимодействия
Для расчета потенциала межатомного взаимодействия используется стандартная аппроксимация:
![]() ,
,
где первое слагаемое в скобках
учитывает отталкивание, а второе – притяжение атомов; ![]() – расстояние между
атомами;
– расстояние между
атомами; ![]() – глубина
потенциальной ямы;
– глубина
потенциальной ямы; ![]() – некоторая функция,
зависящая от расстояния
– некоторая функция,
зависящая от расстояния ![]() .
.
Если предположить, что ![]() имеет характерную для
ван-дер-ваальсовых сил степенную зависимость вида
имеет характерную для
ван-дер-ваальсовых сил степенную зависимость вида ![]() , где
, где ![]() – равновесное
расстояние в отсутствие химического взаимодействия, то получим потенциал
Леннарда-Джонса:
– равновесное
расстояние в отсутствие химического взаимодействия, то получим потенциал
Леннарда-Джонса:
 .
(1)
.
(1)
Далее будем предполагать, что атомы зонда и образца равномерно распределены по своим объемам. С учетом (1) для зондов различной формы задача расчета силы сводится к вычислению следующего интеграла:
 , (2)
, (2)
где ![]() – константа Гамакера;
– константа Гамакера; ![]() ,
, ![]() – объемные плотности
атомов иглы и образца;
– объемные плотности
атомов иглы и образца; ![]() – константа
Ван-дер-Ваальса;
– константа
Ван-дер-Ваальса; ![]() – площадь поперечного
сечения иглы, зависящая от вертикальной координаты.
– площадь поперечного
сечения иглы, зависящая от вертикальной координаты.
Величина взаимодействия макроскопических тел,
получаемая в аддитивном приближении [формула (2)], может иметь погрешность
20-30% при общей правильной асимптотике функции ![]() на больших расстояниях
[2]. Для устранения этого недостатка в работе [3] предложено правило
“перенормировки” константы взаимодействия. Применение данного правила дает
следующую формулу:
на больших расстояниях
[2]. Для устранения этого недостатка в работе [3] предложено правило
“перенормировки” константы взаимодействия. Применение данного правила дает
следующую формулу:
![]() ,
,
где ![]() – константа Лифшица;
– константа Лифшица; ![]() – характерная частота
спектра поглощения [2].
– характерная частота
спектра поглощения [2].
Для типичных сочетаний материалов зонда и образца ![]() находится в узком
интервале от 0,01 до 0,1 эВ [4].
находится в узком
интервале от 0,01 до 0,1 эВ [4].
После вычисления интеграла (2) и последующей замены
константы ![]() на константу
на константу ![]() получаем следующее
выражение силы взаимодействия:
получаем следующее
выражение силы взаимодействия:
![]() ,
(3)
,
(3)
где ![]() ,
, ![]() ,
, ![]() – параметры
аппроксимации, зависящие от формы иглы и свойств материалов образца и зонда.
– параметры
аппроксимации, зависящие от формы иглы и свойств материалов образца и зонда.
Результаты расчетов приведены в табл. 1, в
которой использованы следующие обозначения: ![]() – радиус полусферы и
радиус кривизны кончика иглы в случае параболоида;
– радиус полусферы и
радиус кривизны кончика иглы в случае параболоида; ![]() – площадь основания
цилиндра и прямоугольной пластины;
– площадь основания
цилиндра и прямоугольной пластины; ![]() – угол при вершине
конуса и угол между противоположными гранями четырехугольной пирамиды.
– угол при вершине
конуса и угол между противоположными гранями четырехугольной пирамиды.
Таблица 1. Параметры силовых взаимодействий
|
Форма иглы |
|
|
|
|
|
|
Параболоид, сфера |
|
|
|
|
2 |
|
Конус |
|
|
|
|
1 |
|
Пирамида |
|
Как конус |
Как конус |
Как конус |
1 |
|
Цилиндр, пластина |
|
|
|
|
3 |

На рис. 2 показана зависимость силы взаимодействия
от расстояния для параболического кремниевого зонда и толстой графитовой
пластины. В расчетах было принято: ![]() эВ [4];
эВ [4]; ![]() нм (это значение получено в модели электронного газа);
нм (это значение получено в модели электронного газа); ![]() нм. Кривая интерпретируется следующим образом. На
больших расстояниях (
нм. Кривая интерпретируется следующим образом. На
больших расстояниях (![]() ) между зондом и образцом действует ван-дер-ваальсова сила
притяжения. С уменьшением расстояния
) между зондом и образцом действует ван-дер-ваальсова сила
притяжения. С уменьшением расстояния ![]() эта сила возрастает по
модулю до тех пор, пока атомы не окажутся настолько близко друг от друга, что
их электронные облака начнут отталкиваться под действием обменных сил. При
дальнейшем уменьшении расстояния (
эта сила возрастает по
модулю до тех пор, пока атомы не окажутся настолько близко друг от друга, что
их электронные облака начнут отталкиваться под действием обменных сил. При
дальнейшем уменьшении расстояния (![]() ) обменное отталкивание постепенно ослабляет силу притяжения.
Сила падает до нулевого значения в точке
) обменное отталкивание постепенно ослабляет силу притяжения.
Сила падает до нулевого значения в точке ![]() , когда расстояние между атомами достигает 0,1-0,2 нм,
т.е. характерной длины связи. Атомы входят в полный контакт, когда вся сила
становится положительной, что соответствует расстояниям
, когда расстояние между атомами достигает 0,1-0,2 нм,
т.е. характерной длины связи. Атомы входят в полный контакт, когда вся сила
становится положительной, что соответствует расстояниям ![]() . Наклон кривой в этой области определяет жесткость связи:
. Наклон кривой в этой области определяет жесткость связи: ![]() .
.
|
|
|
Рис.
2. Зависимость силы взаимодействия |
Расчеты сил взаимодействия с использованием потенциала
(1) носят чисто модельный характер, поэтому на практике параметры ![]() ,
, ![]() ,
, ![]() целесообразно находить
из привязки к экспериментальным данным. При выводе (3) предполагалось, что игла
и образец не испытывают деформаций. Действительно, простые оценки показывают,
что при типичных нагрузках (вся область сил отталкивания на рис. 2)
деформация контактной зоны для большинства твердых материалов незначительна и
составляет менее 0,1 нм. Однако для мягких образцов (например, для
полимеров) и твердых зондов, а также при больших нагрузках она может оказаться
существенной. В этом случае силу следует оценивать в рамках контактной
механики.
целесообразно находить
из привязки к экспериментальным данным. При выводе (3) предполагалось, что игла
и образец не испытывают деформаций. Действительно, простые оценки показывают,
что при типичных нагрузках (вся область сил отталкивания на рис. 2)
деформация контактной зоны для большинства твердых материалов незначительна и
составляет менее 0,1 нм. Однако для мягких образцов (например, для
полимеров) и твердых зондов, а также при больших нагрузках она может оказаться
существенной. В этом случае силу следует оценивать в рамках контактной
механики.
Модуляционный режим
В общем случае колебания консоли кантилевера
описываются дифференциальным уравнением в частных производных 4-го порядка,
аналитическое решение которого получить не удается. Можно, однако, найти
решение, соответствующее основному тону (гармонике) колебаний. Ему
соответствует приближение эффективной массы осциллятора. Эффективная масса
вводится с помощью соотношения ![]() , где
, где ![]() и
и ![]() – жесткость и
резонансная частота консоли в отсутствие взаимодействия.
– жесткость и
резонансная частота консоли в отсутствие взаимодействия.
На рис. 3 показаны различные конструкции консолей
кантилеверов; в табл. 2 приведены формулы для расчета собственной частоты
и жесткости консолей, полученные приближенным методом Рэлея-Ритца [5]. В
таблице используются следующие обозначения: ![]() – длина прямоугольной
и цилиндрической консолей;
– длина прямоугольной
и цилиндрической консолей; ![]() – толщина и диаметр консолей;
– толщина и диаметр консолей; ![]() – ширина консолей;
– ширина консолей; ![]() и
и ![]() – расстояние и угол между консолями;
– расстояние и угол между консолями; ![]() и
и ![]() – модуль упругости и плотность материала.
– модуль упругости и плотность материала.
|
|
|
Рис. 3. Конструкция консолей кантилевера |
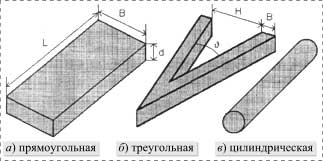
Таблица 2. Резонансная частота и жесткость консолей различной формы
|
Форма консоли |
Резонансная частота, Гц |
Жесткость, Н/м |
|
Прямоугольная |
|
|
|
Треугольная |
|
|
|
Цилиндрическая |
|
|
Таким образом, колебания консоли кантилевера
рассматриваются как колебания гипотетического точечного осциллятора с
эффективной массой ![]() . Движение такого осциллятора описывается классическим
уравнением движения, которое в нашем случае принимает вид:
. Движение такого осциллятора описывается классическим
уравнением движения, которое в нашем случае принимает вид:
 , (4)
, (4)
где ![]() – определяется
формулой (2);
– определяется
формулой (2); ![]() – коэффициент
затухания осциллятора в вертикальном направлении;
– коэффициент
затухания осциллятора в вертикальном направлении; ![]() – амплитуда внешней
силы (ее величина зависит от модулирующего напряжения и свойств пьезокерамики);
– амплитуда внешней
силы (ее величина зависит от модулирующего напряжения и свойств пьезокерамики);
![]() – частота, на которой
возбуждаются колебания кантилевера.
– частота, на которой
возбуждаются колебания кантилевера.
Решение уравнения (4) имеет вид:
![]() ,
(5)
,
(5)
где ![]() и
и ![]() – амплитуда и фаза колебаний,
зависящие от расстояния сканирования.
– амплитуда и фаза колебаний,
зависящие от расстояния сканирования.
Второе слагаемое в правой части (5) описывает начальное смещение консоли кантилевера. Проанализируем основные виды модуляции.
Частотная модуляция. Из уравнения (4) следует, что резонансная частота консоли кантилевера будет изменяться по мере изменения результирующей жесткости, которая, в свою очередь, зависит от градиента силы и расстояния сканирования:
 ,
, ![]() . (6)
. (6)
Изменения в резонансной частоте колебаний используются
для построения топографии образца: система обратной связи АСМ следит за
резонансной частотой, поддерживая ее постоянной. За счет сохранения постоянного
значения резонансной частоты поддерживается постоянным и среднее значение
расстояния от иглы до образца. На рис. 4 показана зависимость резонансной
частоты от расстояния сканирования для распределения сил, приведенного на
рис. 2. Предполагалось, что прямоугольная консоль кремниевого кантилевера
имела следующие размеры: ![]() мкм;
мкм; ![]() мкм;
мкм; ![]() мкм. Минимум этой кривой соответствует расстоянию:
мкм. Минимум этой кривой соответствует расстоянию:
 .
(7)
.
(7)
|
|
|
Рис.
4. Зависимость резонансной частоты |
Расчеты показывают, что ![]() (см. табл. 1). Физически
это обусловлено тем, что в модуляционном режиме регистрируется не сама сила, а
ее градиент. Этот факт экспериментально установлен в работе [6]. Из формулы (6)
следует, что для обеспечения устойчивого сканирования необходимо использовать
жесткие кантилеверы (
(см. табл. 1). Физически
это обусловлено тем, что в модуляционном режиме регистрируется не сама сила, а
ее градиент. Этот факт экспериментально установлен в работе [6]. Из формулы (6)
следует, что для обеспечения устойчивого сканирования необходимо использовать
жесткие кантилеверы (![]() ). Это позволит избежать “прилипания” зонда к поверхности
образца [7].
). Это позволит избежать “прилипания” зонда к поверхности
образца [7].
Несомненным преимуществом данного метода является то, что резонансная частота не зависит от добротности консоли кантилевера. Именно это свойство позволяет получать истинное атомное разрешение в сверхвысоком вакууме, когда добротность достигает ~103-104.
Фазовая и амплитудная модуляции. Фазовая регистрация связана со слежением за запаздыванием по фазе между сигналом, вызывающим колебания кантилевера, и выходным сигналом оптической системы. Амплитудное детектирование основано на измерении фактического отклонения консоли кантилевера. Из уравнения (4) и его решения (5) следуют хорошо известные из теории колебаний выражения
 , (8)
, (8)
где ![]() – добротность консоли.
– добротность консоли.
В формулах (8) присутствует резонансная частота ![]() . Это означает, что изменения в фазе и амплитуде колебаний
будут отражать изменения в силовых свойствах поверхности образца, а положения
экстремумов функций
. Это означает, что изменения в фазе и амплитуде колебаний
будут отражать изменения в силовых свойствах поверхности образца, а положения
экстремумов функций ![]() и
и ![]() (по крайней мере,
отдельные из них) будут определяться формулой (7). В качестве примера на
рис. 5 показаны зависимости фазы и амплитуды колебаний консоли кантилевера
от расстояния сканирования.
(по крайней мере,
отдельные из них) будут определяться формулой (7). В качестве примера на
рис. 5 показаны зависимости фазы и амплитуды колебаний консоли кантилевера
от расстояния сканирования.
|
|
|
|
|
Рис. 5. Зависимость фазы (а) и амплитуды (б) колебаний консоли кантилевера от расстояния сканирования |
Методы фазовой и амплитудной модуляций применяются,
как правило, в воздушных вариантах АСМ (добротность здесь составляет ![]() ). Так, одним из распространенных методов амплитудной модуляции
является режим измерения жесткости. В этом режиме зонд и образец приводятся в
жесткий контакт. Модулирующее напряжение подается на
). Так, одним из распространенных методов амплитудной модуляции
является режим измерения жесткости. В этом режиме зонд и образец приводятся в
жесткий контакт. Модулирующее напряжение подается на ![]() -пьезопривод образца. Оптическая система регистрирует амплитуду
отклика консоли кантилевера, которая, в конечном счете, характеризует упругие
свойства контакта.
-пьезопривод образца. Оптическая система регистрирует амплитуду
отклика консоли кантилевера, которая, в конечном счете, характеризует упругие
свойства контакта.
Наконец отметим, что в современных конструкциях АСМ имеется возможность одновременного слежения за частотой, фазой и амплитудой колебаний.
Фрикционный режим
Измерение сил трения в нанометровом масштабе представляет собой актуальную задачу [8]. Для исследования трибологических свойств твердых тел с помощью АСМ используется режим регистрации боковых сил (фрикционный режим). В данном режиме система сканирования измеряет кручение консоли кантилевера, вызываемое тангенциальными силами. Такие силы могут возникать по двум причинам: изменение “поверхностного трения” и изменение наклона поверхности. Для того, чтобы разделить соответствующие вклады, необходимо получать и анализировать изображения сразу в двух режимах – режимах регистрации нормальных и боковых сил.
Считается, что высокий контраст АСМ-изображений,
получаемых в фрикционном режиме, обусловлен так называемым эффектом
прилипания-скольжения [8]. Для учета этого эффекта будем рассматривать
следующую модель. Предположим, что движение кантилевера вдоль поверхности
образца осуществляется с постоянной скоростью ![]() . Если в моменты времени
. Если в моменты времени ![]() консоль кантилевера
совершает мгновенные скачки, приобретая при этом конечные приращения скорости
консоль кантилевера
совершает мгновенные скачки, приобретая при этом конечные приращения скорости ![]() , то действующую силу можно представить в виде:
, то действующую силу можно представить в виде:
 ,
,
где ![]() – число скачков вдоль
траектории;
– число скачков вдоль
траектории; ![]() – дельта-функция
Дирака.
– дельта-функция
Дирака.
При ![]() имеет место обычное
затухающее движение. С учетом всего сказанного уравнение движения записывается
в виде
имеет место обычное
затухающее движение. С учетом всего сказанного уравнение движения записывается
в виде
 , (9)
, (9)
где ![]() ,
, ![]() – латеральные коэффициент
затухания и резонансная частота консоли кантилевера.
– латеральные коэффициент
затухания и резонансная частота консоли кантилевера.
Первое слагаемое в правой части (9) задает координату держателя кантилевера. Решение уравнения (9), очевидно, должно удовлетворять следующим начальным условиям:
![]() ,
, ![]() .
(10)
.
(10)
Возникновению устойчивых колебаний соответствует
условие ![]() , где
, где ![]() – дискриминант характеристического
уравнения
– дискриминант характеристического
уравнения ![]() . Условие “критического демпфирования”, при котором начинается
регулярное скольжение зонда, имеет вид:
. Условие “критического демпфирования”, при котором начинается
регулярное скольжение зонда, имеет вид:
![]() (или
(или ![]() ).
).
Решить уравнение (9) с учетом начальных условий (10) можно, например, методом вариации постоянных. Решение записывается в виде
 (11)
(11)
Полученное решение можно использовать как для моделирования траектории латерального движения консоли кантилевера АСМ, так и для моделирования траекторий латерального движения сенсоров в зондовых микросистемах записи и считывания информации. С помощью выражений (11) легко также найти амплитудно-частотную и фазо-частотную характеристики кантилевера. Основным преимуществом предлагаемой модели (по сравнению с другими известными моделями) является то, что в ее рамках удается получить точное аналитическое выражение для траектории. Уравнение (9) очень просто обобщается на двумерный случай путем введения двух эффективных масс, коэффициентов жесткости и постоянных затухания [8].
![]()
В заключение отметим, что при больших нагрузках кроме явления прилипания-скольжения в системе зонд – образец могут происходить деформация и изнашивание, химические реакции и фазовые переходы. По этим причинам реальная картина взаимодействия зонда с поверхностью оказывается чрезвычайно сложной.
Список литературы
1. Быков В.А. Микромеханика для сканирующей зондовой микроскопии и нанотехнологии // Микросистемная техника. 2000. № 1. С. 21.
2. Бараш Ю.С. Силы Ван-дер-Ваальса. М.: Наука. 1988.
3. Моисеев Ю.Н., Мостепаненко В.М., Панов В.И. и др. Экспериментальное и теоретическое исследование сил и пространственного разрешения в атомно-силовом микроскопе // ЖТФ. 1990. Т. 60. № 1. С. 141-148.
4. Buttner H., Gerlach E. Van Der Waals-Interation of ionic and covalent crystals // Chem. Phys. Lett. 1970. V. 5. № 2. P. 91.
5.
Работнов Ю.Н. Механика деформируемого твердого тела. М.: Наука. 1988.
6. Gotsmann В., Anczykowski В., Seidel С., Fuchs H. Determination of tip-sample interaction forces from measured dynamic force spectroscopy curves // Appl. Surf. Sci. 1999. V. 140. P. 314-319.
7. Рехвиашвили С.Ш. Особенности силовых взаимодействий в бесконтактном режиме атомно-силового микроскопа // Письма в ЖТФ. 2000. Т. 26. № 12. С. 46-50.
8.
Дедков Г.В. Нанотрибология: экспериментальные факты и
теоретические модели // УФН. 2000. Т. 170. № 6. С. 585-618.
| Наверх |