УДК 629.7.005
С.В.Абрамов, В.М.Ачильдиев, канд. техн. наук, ФГУП НИИ ПМ им. академика В.И.Кузнецова, Москва;
О.А.Мезенцев, МГТУ им. Н.Э.Баумана, Москва, PD candidate, University of Calgary, Canada
Мобильный комплекс для локального мониторинга урбоэкосистем на основе микролетательного аппарата
![]()
|
Анализируются работы по созданию мобильного комплекса для локального мониторинга
урбоэкосистем на основе микролетательных аппаратов. Рассмотрены схемы
комплекса и микролетательных аппаратов, их состав и основные проектные
характеристики. Приведены предварительные расчетные и экспериментальные
характеристики одельных элементов микролетательного аппарата. |
![]()
Развитие микроэлектроники, вычислительной техники и особенно микромеханики, а также появление новых композиционных материалов создали основу технических средств для разработки микролетательных аппаратов (МЛА) локального наблюдения урбоэкосистем. МЛА как отдельный подкласс дистанционно пилотируемых летательных аппаратов (ДП ЛА) – это полуавтономный или автономный летательный аппарат, размером менее 15 см в любом измерении, массой около 100 г. МЛА должен выполнять различные военные и гражданские задания, имея при этом приемлемую цену (менее 1000 долл.). На аппарате должна быть установлена видеокамера с отображением изображения в режиме реального времени, навигационная и связная аппаратура. МЛА должен летать от 20 мин до 2 ч с радиусом действия от 1 до 10 км и скоростью больше 45 км/ч.
Основными задачами, которые должны решать МЛА, являются разведка (фото и видео в режиме реального времени); ретрансляция связи в городских условиях; поисково-спасательные работы; исследования внутренних областей зданий; передача информации о результатах применения управляемых боеприпасов и корректировка огня; контроль лесных массивов и сельскохозяйственных угодий; слежение за миграцией зверя в охотничьих хозяйствах; контроль за экологическим состоянием окружающей среды: взятие проб воздуха (газовоздушной смеси), воды (жидкой среды), грунта; дистанционное наблюдение Земли.
В настоящее время на основе микромеханических и наномеханических систем ведутся разработки новых классов автономно пилотируемых (АП) МЛА и микророботов с массой от долей грамма до нескольких десятков граммов [1,2]. Основное преимущество микророботов и МЛА для наблюдения и исследования планет Солнечной системы и Земли - - это их низкая стоимость по сравнению с обычными аппаратами [3].
Конструкции таких АП МЛА в зависимости от назначения и резкой смены условий эксплуатации будут существенно отличаться друг от друга. Так, например, АП МЛА для исследования Марса наиболее рационально выполнить по самолетной схеме, а для исследования Венеры аппарат имеет смысл выполнить в виде микрозондов сферической или дискообразной формы с удельной плотностью конструкции, близкой к плотности атмосферы планеты. Объем такого аппарата может быть доведен до объема настольного теннисного мяча (Æ40 мм). Навигационная система таких МЛА должна содержать датчики, выполненные на основе нанотехнологии, способные реагировать на изменение гравитации планеты.
Технологическая выполнимость МЛА является следствием успехов в нескольких микротехнологиях, в особенности технологиях микроэлектромеханических систем (MEMS). Эти системы объединяют пленарные электронные микрокомпоненты с сопоставимыми по размерам пространственными электромеханическими структурами различной сложности, что позволяет порой достичь уникальных функциональных возможностей. В настоящее время такие устройства производят промышленным способом. Дальнейшие исследования в этом направлении направлены на удешевление промышленного производства систем MEMS.
Другим направлением развития микроэлектронных систем является разработка крошечных видеокамер, миниатюрных инфракрасных датчиков и датчиков биологического и химического анализа для обнаружения опасных материалов. Размер этих устройств не превышает размера обычных микросхем и является определяющим в выборе объема МЛА.
В настоящее время интенсивные работы по созданию МЛА ведутся как у нас в стране, так и за рубежом. Большой интерес представляют МЛА на основе винтокрылых летающих “тарелок” и безопорных МЛА. Для данного класса аппаратов резко снижаются габаритно-массовые показатели и упрощаются схемы управления автоматом стабилизации.
На базе разрабатываемых конструкций автономно пилотируемых аппаратов возможно создание АП МЛА для исследования планет Солнечной системы. В табл. 1 приведены основные технические характеристики разрабатываемых МЛА [1-4].
Таблица 1. Микромеханические летательные аппараты
|
Характеристика |
Наименование
разработчика |
||||
|
БЛА-2 |
АР-1, |
Black
Widow |
MA,
MLBCo |
“Пустельга-
1” НИИ ПМ |
|
|
Масса, грамм |
200 |
500 |
100 |
– |
100 |
|
Энергоноситель |
Аккумуляторы |
Углеводород |
Аккумуляторы |
||
|
Размеры, мм |
2000×1000 |
320×320 |
150×150 |
150×150 |
Æ50×150 |
|
Система управления |
Радиоуправляемая |
БИНС + GPS |
Радиоуправляемая |
БИНС + GPS |
|
|
Диапазон высот применения,
м |
До 5000 |
До 1500 |
600 |
60 |
До 1500 |
|
Продолжительность полета, ч |
0,7 |
0,7 |
0,5 |
0,3 |
1,0 |
|
Скорость полета, км/ч |
60 ÷ 80 |
36 ÷ 54 |
54 |
– |
54 |
|
Аппаратура наблюдения |
ТК |
ТК |
ТК |
ТК |
ТК |
|
Дальность, км |
10,0 |
7,5 |
2,0 |
1,8 |
5,0 |
|
Наземный комплекс
управления |
– |
На базе ноутбука |
– |
– |
На базе ноутбука |
По нашему мнению, одним из наиболее перспективных вариантов является АП МЛА “Пустельга”, который выполнен по вертолетной схеме и оснащен видеокамерой. На базе этого аппарата создается мобильный комплекс локального мониторинга урбоэкосистем.
Структурная схема мобильного комплекса локального мониторинга (МК ЛМ) урбоэкосистем на основе АП МЛА “Пустельга” приведена на рис. 1.
|
|
|
Рис. 1. Структурная схема мобильного комплекса локального мониторинга урбоэкосистем |
МК ЛМ состоит из АП МЛА и мобильного комплекса управления (МКУ). МКУ состоит из корпуса типа “CASE”, являющегося одновременно и тарой для транспортировки АП МЛА, мобильного компьютера, инерциального блока, аккумуляторной батареи, зарядного устройства и преобразователя напряжения для МКУ, GPS приемника, блока наземной приемно-передающей аппаратуры с антенной, компаса, электронного уровня, комплекта запасных аккумуляторов для АП МЛА, зарядного устройства для аккумуляторов АП МЛА.
Размеры МК ЛМ урбоэкосистем на основе АП МЛА составляют примерно 1000×800×200 мм, а масса не более 5 кг. Схема построения АП МЛА приведена на рис. 2, а внешний вид макета одновинтового АП МЛА на рис. 3.
|
|
|
Рис. 2. Схема построения АП МЛА |
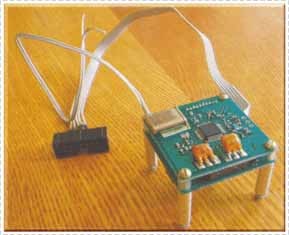
АП МЛА состоит из фюзеляжа, который включает в себя корпус приборного отсека, гондолу двигателя, на которой с помощью штанг укреплен дефлектор. В гондоле установлен двигатель с редуктором и винтом, контроллером управления и с одной или несколькими рулевыми машинками. В дефлекторе по периферии размещены проблесковые маячки, а на штангах – антенны GPS приемника, передатчика видеоизображения и антенны бортовой приемно-передающей аппаратуры. В корпусе приборного отсека установлена аккумуляторная батарея, видеокамера с передатчиком видеоизображения, плата GPS приемника, плата микромеханического бесплатформенного инерци-ального блока с микропроцессором (рис. 4) и плата датчиковой аппаратуры.
|
|
|
|
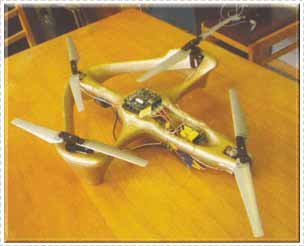
Рис. 3. Внешний вид макета |
Рис. 4. Плата микромеханического |
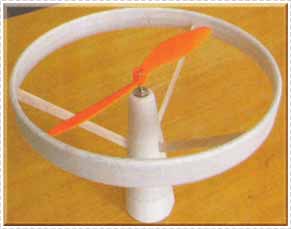
АП МЛА представляет собой аппарат с одним несущим винтом. Фюзеляж МЛА изготовлен по симметричной схеме из композиционного материала и вписывается в сферу обметания с винтом 150 мм. Для управления по крену и тангажу используются две рулевые машинки, которые изменяют вектор тяги винта с двигателем относительно корпуса АП МЛА. Управление по курсу осуществляется аэродинамическими рулями.
Скорость полета аппарата зависит от тяговооруженности и площади аппарата в
плане. Площадь поверхности в плане ![]() выбирается из условия
ее минимальности. На рис. 5 приведена зависимость силы лобового
сопротивления
выбирается из условия
ее минимальности. На рис. 5 приведена зависимость силы лобового
сопротивления ![]() от площади и скорости
полета аппарата
от площади и скорости
полета аппарата ![]() . Исходя из приведенных зависимостей для одновинтовой схемы
скорость аппарата выбрана
. Исходя из приведенных зависимостей для одновинтовой схемы
скорость аппарата выбрана ![]() м/с,
м/с, ![]() м, при этом
м, при этом ![]() Н.
Н.
|
|
|
|
|
Рис. 5. зависимость силы лобового сопротивления |

В табл. 2 приведены массовые характеристики АП МЛА с четырьмя, двумя и одним несущим винтом. Макет АП МЛА на основе авиамодели ENGAGER GSIII приведен на рис. 6.
Таблица 2. Массовые характеристики АП МЛА
|
Наименование
элементов |
Масса, г |
||
|
“Пустельга-4” |
“Пустельга-
2” |
“Пустельга-
1” |
|
|
Корпус |
22 |
12 |
8 |
|
Аккумуляторы |
42 |
42 |
22 |
|
Электродвигатель с винтом
и редуктором |
4×12 |
2×12 |
12 |
|
Видеокамера с передатчиком
видеоизображения |
13,5 |
13,5 |
13,5 |
|
GPS антенна |
7,0 |
7,0 |
7,0 |
|
МикроБИНС |
10,0 |
10,0 |
10,0 |
|
Блок приемо-передающей
аппаратуры |
4,0 |
4,0 |
4,0 |
|
Блок датчиковой аппаратуры |
20 |
10 |
5 |
|
Рулевые машинки |
– |
1×5 |
2×5 |
|
Винты |
4x0,5 |
2×x0,5 |
1×0,5 |
|
Общая масса |
170,5 |
128,5 |
92 |
Как видно из табл. 2, масса аппаратов лежит в диапазоне от 92 до 170,5 г. На рис. 7 показаны тяга электрического двигателя с различными диаметрами винтов при коэффициенте редукции 4:1 и специально профилированного винта с коэффициентом редукции редуктора 8:1 в зависимости от потребляемой мощности.
|
|
|
|
Рис. 6. Макет АП МЛА с четырьмя винтами |
Рис. 7. Зависимость тяги электрического двигателя |
В результате испытаний установлено, что наиболее эффективен винт с диаметром 150 мм. Профилирование винта по сечениям приводит к увеличению тяги на 30%. Анализ результатов испытаний показывает, что дальнейшая оптимизация геометрии винта и использование дефлектора и редуктора с коэффициентом редукции 16:1 позволяет увеличить тягу еще примерно на 30÷50%.
Исходя из этого, для рассматриваемых аппаратов при аккумуляторе с емкостью 2,1 А/ч время полета составляет 45 мин.
Стабилизация МЛА по траектории его движения осуществляется автоматически с помощью автопилота. В автопилоте имеются три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловой скорости используются микромеханические вибрационные гироскопы, в качестве датчиков высоты – микромеханический акселерометр и барометрический высотомер.
Законы управления формируются с помощью микроконтроллера и позволяют осуществлять стабилизацию курса, крена и тангажа в прямолинейном полете (стабилизация углов относительно центра масс) и координированных разворотов. Навигация в процессе полета осуществляется с помощью интегрированной бесплатформенной инерциальной навигационной системы (БИНС) и GPS приемника. Для кратковременных участков полета навигация осуществляется в системе координатной сетки для данной проекции карты [6].
Текущие координаты получают путем интегрирования измеренной истинной скорости по формулам:
![]() ;
;
![]() ;
;
 ;
;
 ,
,
где ![]() ,
, ![]() – составляющие
скорости АП МЛА на Север и Восток;
– составляющие
скорости АП МЛА на Север и Восток; ![]() - истинная воздушная
скорость;
- истинная воздушная
скорость; ![]() ,
, ![]() – углы тангажа и
курса, соответственно;
– углы тангажа и
курса, соответственно; ![]() - вертикальный угол
между продольной осью и истинной скоростью;
- вертикальный угол
между продольной осью и истинной скоростью; ![]() – угол скольжения.
– угол скольжения.
Работа мобильного комплекса локального мониторинга урбоэкосистем осуществляется следующим образом. На монитор мобильного компьютера выводятся карта района патрулирования и, по сигналу наземной интегрированной БИНС, координаты оператора или транспортного средства. С помощью клавиатуры задается траектория полета (прямолинейная, змейка и т.д.), конечная точка маршрута, высота, скорость полета и команда “Взлет”. Полет осуществляется в автономном режиме. После набора высоты аппарат начинает движение по маршруту, передавая свои параметры движения и видеоизображение в реальном масштабе времени.
На монитор мобильного компьютера выводятся: карта той местности, которой проводится мониторинг; видеоизображение участка исследуемой поверхности; координаты видеоизображения АП МЛА; расположение транспортного средства; конечная точка маршрута. Аппарат управляется с клавиатуры мобильного компьютера. Размер визируемой поверхности в одном кадре 50×50 м на высоте 150 м с разрешением 0,2 м, с точностью привязки кадра к электронной карте местности 5÷10 м. В процессе полета АП МЛА может зависать над заданной точкой, менять высоту зависания и скорость полета. Посадка осуществляется автоматически до высоты 5÷10 м, далее аппарат падает в режиме авторотации винта. Введение в состав комплекса дополнительно одного или двух аппаратов, трех комплектов аккумуляторов и двух зарядных устройств позволит осуществлять непрерывное инспектирование района.
В качестве дополнительной аппаратуры на АП МЛА могут стоять приборы для широкоспектрального контроля окружающей среды, а именно, для сбора различной информации (биологической, химической, а также радиолокационной). Модуль датчиковой аппаратуры имеет унифицированные посадочные места и в зависимости от решаемых задач его можно в процессе работы заменять. Кроме этого, в состав телеметрируемой информации входят температура, давление и скорость ветра.
В процессе полета АП МЛА позволяет определять неблагоприятный и недоступный районы инспектирования с привязкой к электронной карте местности.
Список литературы
1. Климов Д.М., Васильев А.А., Лучинин В.В., Мальцев П.П. Перспективы развития микросистемной техники в XXI веке // Микросистемная техника. 1999. № 1. С. 3-8.
2. Рубцов И.В., Нестеров В.Е., Рубцов В.И. Современная зарубежная военная микро- и мини-робототехника // Микросистемная техника. 2000. № 3. С. 36-42.
3. Ачильдиев В. М., Дудко В. Г., Есаков В.А. и др. Дистанционно пилотируемый микролетательный аппарат для локального мониторинга лесных и урбоэкосистем // Труды международной конференции “Математические и физические методы в экологии и мониторинге природной среды”. М.: МГУЛ, 2001. С. 290-294.
4. Ермаков В.А., Михоленок А.Н. Анализ состояния и развития беспилотных летательных аппаратов // Микросистемная техника. 2002. № 3. С. 40-42.
5. Самолетные навигационные системы / Под ред. Полянова В.Ю. М.: Военное издательство, 1973. С. 22-23.
| Наверх |