УДК 623.3
В.М.Лохин, С.В.Манько, М.П.Романов,
И.Б.Гарцеев, К.С.Колядин,
Московский государственный институт радиотехники, электроники и автоматики
Тенденции развития беспилотных летательных
аппаратов мини- и микроклассов
![]()
|
Приведен обзор существующих и
перспективных образцов малогабаритных БПЛА, проанализированы основные тенденции
и проблемы их разработки. |
Введение
Одно из важнейших направлений в современной авиации связано с разработкой беспилотных летательных аппаратов (БПЛА), первые образцы которых появились еще в середине прошлого века, как отдельный вид перспективного оружия. В настоящее время БПЛА различных типов и назначения не только стоят на вооружении многих армий мира, но и начинают активно использоваться в гражданской сфере. Широкий спектр практических применений БПЛА охватывает решение следующих основных задач:
· оптическая, радиолокационная, химическая, бактериологическая и радиационная разведка;
· нанесение ударов для уничтожения объектов и живой силы противника;
· радиоэлектронная борьба;
· мониторинг экологической обстановки;
· поддержание сетевых телекоммуникаций;
· контроль морского судоходства и т.д.
Логика развития беспилотной авиации на рубеже XX-XXI вв. привела к возникновению класса малогабаритных летательных аппаратов (МЛА).
Анализ тенденций, опыта и проблем разработки МЛА представляет существенный интерес и актуальность.
Анализ тенденций развития малогабаритных БПЛА
Появление класса малогабаритных БПЛА обусловлено целым рядом различных факторов, главными из которых являются:
· возникновение принципиально новых областей потенциального применения БПЛА, например, в составе комплектов индивидуального оснащения бойца в качестве средства оперативного сбора информации об особенностях и характере боевой обстановки или в качестве средства локального поражения противника;
· ужесточение требований к функциональным и эксплуатационным возможностям БПЛА, включая повышение скрытности и оперативности сбора и передачи разведывательной информации, а также значительное снижение массогабаритных характеристик.
Рассмотрим наиболее типичных представителей данной модельной группы и функциональные особенности их систем управления.
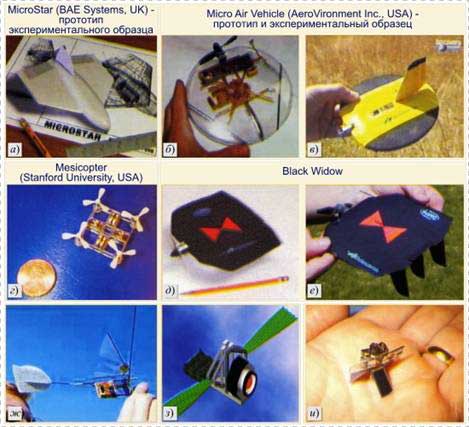
MicroStar (http://www.baesystems uavsolutions. com/UAVs.htm) (BAE Systems, UK) (рис. 1,а, рис. 2,) ‑ перспективный образец микролетательного аппарата для индивидуальной экипировки бойцов спецназа. Оснащается средствами GPS, видео и инфракрасной камерами, приемопередающим устройством. Продолжительность полета – 20 мин, высота полета ‑ до 100 м.
|
|
|
Рис. 1. Беспилотные летательные аппараты мини- и
микроклассов |
|
|
|
Рис. 2. Микролетательный аппарат MicroStar |
Blank Widow (http://www.aerovironment.com) (Aero Vironment Inc., USA) (рис. 1,e) ‑ образец микролетательного аппарата для индивидуальной экипировки бойцов спецназа. Прототипы аппарата разрабатывались по заказу Агентства перспективных оборонных исследований США DARPA с 1986 г. (рис. 1,б,в,д). Оснащен электрическим винтовым двигателем, цветной видеокамерой, приемопередатчиком с рабочей частотой 433 МГц, автопилотом и системой спутниковой навигации. Максимальные линейные размеры аппарата составляют порядка 15 см, масса ‑ 80...100 г, продолжительность полета ‑ 30 мин, скорость полета ‑ около 50 км/ч; высота полета ‑ 230 м; радиус действия ‑ 1,8 км. Переносная система дистанционного управления (рис. 3) имеет в своем составе жидкокристаллический дисплей, позволяющий отображать видеоинформацию с борта микролетательного аппарата.
|
|
|
Рис. 3. Система дистанционного управления |

Mesicopter (http://aero.stanford.edu/mesicopter/) Stanford University, California, USA) (см. рис. 1,г) ‑ это экспериментальный образец микролетательного аппарата, построенного по вертолетной схеме. Разработан при поддержке NASA для демонстрации и изучения возможностей MEMS-технологий в создании микролетательных аппаратов сантиметровых размеров.
MfcroBat (AeroVironment Inc., USA) (см. рис. 1,ж) — экспериментальный образец микролетательного аппарата, построенного на основе MEMS-технологий по схеме с машущим крылом. Разрабатывается по заказу Агентства перспективных оборонных исследований США DARPA. Линейный размер составляет около 20 см, масса порядка 10 г.
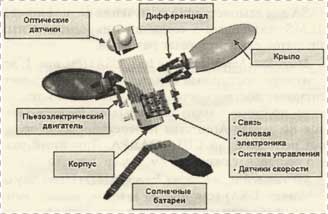
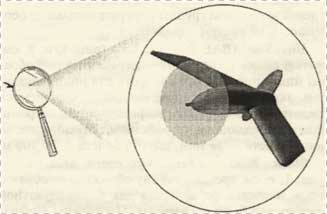
Micromechanical Flying Insect (MFI) (University of California, USA) (см. рис. 1,з,и) ‑ экспериментальный образец микролетательного аппарата, создаваемого по заказу Агентства перспективных оборонных исследований США DARPA на основе MEMS-технологий по схеме с машущим крылом (http://robotics.eecs.berkeley.edu/ronf/mfi.html). В разработке конструктивных принципов использованы бионические аналогии с летающими насекомыми (рис. 4). Линейные размеры не превышают 25 мм.
|
|
|
Рис. 4. Конструкция миниатюрного летательного аппарата |
Трудности, с которыми столкнулись разработчики, обусловлены прежде всего тем, что при малых габаритных размерах летательного аппарата его аэродинамические поверхности (крылья или профилированный фюзеляж) имеют крайне низкие аэродинамические характеристики, а органы управления в виде отклоняемых поверхностей ‑ малоэффективны. И если в 1980-е годы успешность разработки малоразмерных дистанционно пилотируемых летательных аппаратов обеспечивалась путем простого масштабирования традиционных самолетных схем, то для решения задачи создания микролетательного аппарата необходимо рассмотреть принципиально новые решения, прежде всего, собственно в его конструкции и принципах действия. Поэтому в США ведутся активные научно-исследовательские и опытно-конструкторские работы поискового характера, связанные с созданием летательных аппаратов с нетрадиционной конструктивной схемой.
В качестве примера может быть приведен безэкипажный малоразмерный летательный аппарат Gopher (типа "летающая тарелка") вертикального наземного взлета. Он разработан в рамках программы создания многоцелевой платформы для решения различных боевых задач, включая охрану военных объектов и освещение обстановки ‑ Multypurpose Security and Surveillance Mission Platform (MSSMP) (рис. 5).
|
|
|
Рис. 5. Экспериментальный безэкипажный малоразмерный |

Безэкипажный малоразмерный летательный аппарат MSSMP Gopher обеспечивает решение разведывательных задач на удалении до 10 км от наземной станции управления. В состав бортовых средств его системы наблюдения входят видеокамера, устройство ночного видения на базе приемника ИК-изображения, лазерный дальномер и аппаратура акустического контроля.
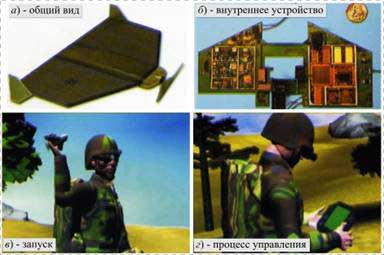
Предварительный проект альтернативного варианта микролетательного аппарата с традиционной аэродинамической схемой (рис. 6) разрабатывается в ОКБ А.С.Яковлева.
|
|
|
Рис. 6. Предварительный проект микролетательного аппарата |
Исходные данные к проекту определяют высокий уровень тактико-технических характеристик перспективной разработки, не уступающей лучшим из создаваемых образцов микролетательных аппаратов военного назначения:
· масса экспериментального образца …………. 600 г;
· масса опытного образца ……………………… 100... 150 г;
· размах крыла экспериментального образца … 400 мм;
· размах крыла опытного образца ……………. 150...200 мм;
· скорость ………………………………………. 0...20 м/с;
· продолжительность полета ………………….. 20 мин;
· радиус действия ………………………………. 1 км;
· целевая нагрузка ………………….. телевизионная камера;
· силовая установка …………………… электродвигатель;
"Альбатрос" (НИИ ПФМ ХАИ, Украина) ‑ перспективный образец малогабаритного БПЛА, общий вид (рис. 7) и характеристики которого представлены ниже.
Основные
характеристики МЛА "АЛЬБАТРОС"-3:
Масса взлетная ……………………………… 5 кг
Полезная нагрузка ………………………….. 1 кг
Максимальная высота полета …………… 4000 км
Крейсерская скорость полета ………….. 50 км/ч
Продолжительность полета ……………. до 20 ч
Радиус действия ………………………… 500 км
|
|
|
Рис. 7.
MJIA "АЛЬБАТРОС"-3 |

Мини-БПЛА "Альбатрос" предназначен для разведки и наблюдения в течение длительного времени в интересах спецподразделений, сил правопорядка и других ведомств.
Высокие летные характеристики достигаются оптимизированной компоновкой БПЛА, обеспечивающей высокое аэродинамическое качество, и высокоэкономичным четырехтактным бензиновым двигателем, оснащенным системой зажигания с микропроцессорным управлением и многокамерным карбюратором. Специально спроектированный воздушный винт дополнительно способствует повышению эффективности силовой установки. Расход топлива при крейсерской скорости 50 км/ч не более 40 г/ч.
Старт летательного аппарата осуществляется с руки, посадка ‑ в режиме парашютирования, что обеспечивается специальным подбором параметров БПЛА. Благодаря использованию углепластиков и органопластиков, современных конструктивных и технологических схем масса конструкции БПЛА составляет 20% от взлетной массы.
Высокая весовая отдача БПЛА достигнута и благодаря использованию компактных и легких компонентов бортового оборудования. Так масса бортового компьютера составляет 125 г, приемника спутниковой системы навигации с антенной – 100 г, а масса каждого привода рулей и других механизмов БПЛА ‑ менее 20 г.
Бортовое оптическое оборудование располагается на поворотной турели под фюзеляжем БПЛА, оборудованной системой управления и стабилизации.
Основу наземной станции управления составляют рабочие места пилота и оператора целевых систем. Каждое рабочее место оборудовано компьютером типа Notebook, один из которых имеет CD-дисковод для ввода картографической информации. Передаваемая с борта БПЛА информация может записываться на видеомагнитофон с речевыми комментариями операторов комплекса.
Наземные узконаправленные антенны имеют следящий привод для увеличения дальности радиосвязи при ограниченной мощности передатчиков.
С одной наземной станции может обеспечиваться управление полетом шести БПЛА одновременно, что значительно увеличивает зону наблюдения.
"Стриж-М" (НИИ ПФМ ХАЙ, Украина) ‑ перспективный образец малогабаритного БПЛА, общий вид (рис. 8) и характеристики которого представлены ниже.
Основные
характеристики МЛА "СТРИЖ-М"-3:
Масса взлетная …………………………… 2 кг
Масса полезной нагрузки ……………… 0,5 кг
Скорость полета ………………… 70-110 км/ч
Продолжительность полета ………….. до 1 ч
Радиус действия ………………………. 10 км
|
|
|
Рис. 8. МЛА "СТРИЖ-М"-3 |

Мини-БПЛА "Стриж-М" оснащен электрической силовой установкой и позволяет получать оперативную видеоинформацию для передовых специальных подразделений. Изображение с бортовой телекамеры в реальном масштабе времени передается на монитор наблюдателя, видеомагнитофон и другие наземные средства (рис. 9,а). Возможна установка двух телекамер для получения стереоскопического изображения зоны наблюдения (рис. 9,б).
|
|
|
Рис. 9.
Мини БПЛА "Стриж-М |

Конструкция БПЛА выполнена из композиционных материалов и обеспечивает многократное применение БПЛА при низкой стоимости изготовления. Запуск осуществляется с помощью легкого ручного пускового устройства, посадка ‑ под парашютом. Сборка БПЛА перед запуском максимально упрощена. Крыло крепится к фюзеляжу, проводится автоматизированная проверка бортового оборудования, БПЛА ставится на пусковое устройство и он готов к полету.
Устойчивость видеоизображения обеспечивается собственной аэродинамической устойчивостью БПЛА и гироскопической системой стабилизации. В качестве полезной нагрузки используется цветная или черно-белая телекамера, работающая при низком уровне освещенности. Электрическая силовая установка обеспечивает простоту и надежность применения и не требует высокой квалификации обслуживающего персонала. Низкая акустическая, визуальная, тепловая и радиолокационная заметность обеспечивает возможность скрытного применения.
Pointer (Aero Vironment Inc., USA) ‑ электрический малогабаритный дистанционно-пилотируемый летательный аппарат тактической разведки (рис. 10), используемый в армии США. Оснащается средствами GPS и автонавигации, а также цветной или инфракрасной камерой, обеспечивающей передачу видеоизображений на пульт оператора, записывающее устройство или удаленный наземный приемный пункт в реальном времени. Запускается с руки, прост в управлении и не требует предварительной подготовки оператора.
|
|
|
Рис. 10. Запуск малогабаритного БПЛА Pointer (AeroVironment
Inc., USA) |

Основные технические
характеристики:
|
· продолжительность полета ………………….. |
1,5ч; |
|
· полетная скорость ……………………………. |
29...80 км/ч; |
|
· радиус полета …………………………………. |
8 км; |
|
· посадка ………………………………………… |
автоматическая, |
|
· несущая конструкция ………………………… |
композит Kevlar; |
|
· размах крыльев ………………………………... |
2,7м; |
|
· длина …………………………………………… |
1,8м; |
|
· средняя полетная масса ………………………. |
3,6 кг; |
|
· пустая масса …………………………………… |
2,2кг; |
|
· масса аккумуляторных батарей ……………… |
1,0кг; |
|
· нагрузка ……………………………………….. |
до 0,9 кг; |
|
·
габаритные размеры и масса наземного |
175´275´400 мм; |
|
·
габаритные размеры и масса контейнеров |
150´375´900 мм; |
Заключение
Обобщение результатов проведенного обзора позволяет выявить основные тенденции в развитии малогабаритных БПЛА:
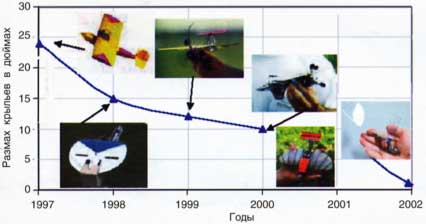
1. Все более расширяющийся спектр возможных применений БПЛА, наряду с ужесточением требований, предъявляемых к данным устройствам в существующих сферах использования, создают тенденцию к микроминиатюризации БПЛА (рис. 11), массогабаритные характеристики которых могут варьироваться в диапазонах от десятков сантиметров и сотен граммов (для образцов мини-класса) до десятков миллиметров и сотен миллиграммов (для образцов микро-класса).
|
|
|
Рис. 11. Тенденция уменьшения размеров малогабаритных БПЛА |
2. Микроминиатюризация БПЛА неразрывно связана с многократным усложнением проблемы их стабилизации ввиду резкого повышения восприимчивости малогабаритных аппаратов к воздействию внешних возмущений, что, в свою очередь, предопределяет тенденцию существенного расширения адаптивных возможностей бортовой системы управления.
3. Особенности функционирования и прикладного применения малогабаритных БПЛА существенно затрудняют использование человека-оператора (как объекта с малым быстродействием и существенным ограничением психофизиологических возможностей) в контуре управления устройства.
Данная проблема вызывает явную тенденцию в перенесении части интеллектуальных функций человека-оператора в число реализуемых бортовой системой управления.
Современные достижения в сфере нанотехнологий, материаловедения, микросистемной техники [1,2], а также в информационных технологиях и методах обработки знаний позволяют говорить о реальности перспектив разработки интеллектуальной бортовой системы управления [3,4], обеспечивающей высокую степень адаптивности, автономности и надежности функционирования малогабаритных БПЛА в условиях неопределенности и воздействия внешних возмущений*.
*
В рамках поисковых исследований, проводимых на кафедре "Проблемы
управления" МИРЭА, показана принципиальная возможность построения
интеллектуальной системы управления, обеспечивающей реализацию автономного
полета БПЛА на низких высотах с уклонением от препятствий, а также
автоматическую посадку на неподготовленную площадку под контролем бортовой
системы технического зрения.
Список литературы
1. Климов
Д.М., Васильев А.А., Лучинин В.В., Мальцев П.П. Перспективы развития
микросистемной техники в XXI
веке // Микросистемная техника. 1999.
№1. С. 3-6.
2. Бочаров
Л.Ю., Мальцев П.П. Состояние и перспективы развития микроэлектромехническнх
систем за рубежом // Микросистемная техника. 1999. №1. С. 41-46.
3. Макаров
И.М., Лохин В.М., Манько С.В. и др. Интеллектуальные системы управления
беспилотными летательными аппаратами на основе комплексного применения
технологий нечеткой логики и ассоциативной памяти // Авиакосмическое
приборостроение. 2002. №2. С. 29-42.
4. Макаров
И.М., Лохин В.М., Манько С.В., Романов М.П., Евстигнеев Д.В.
Интеллектуальная система управления автоматической посадкой беспилотного
летательного аппарата на основе комплексного применения технологии нечеткой
логики // Новые методы управления сложными системами. Москва, Наука, 2004.